~苦行間欠~
回路図はこんな感じです。
減速機付きのモーターは5rpmですが、低軌道衛星を追尾させるにはAOSからLOSまで、方位角180°に15分程度かかります。
つまり1回転に30分(=0.033rpm)にまで落とすため、減速比はさらに1:150が必要です。
ローテーターによる追尾は手動の場合、一定間隔でレバーをチョイチョイ押すわけですから、これと全く同じことを回路にやらせます。
つまりこのモーターをON:OFF=1:150の間欠動作させればいいわけで、これはタイマー回路で実現できます。
制御回路は、「かりおかの実験室」さん(https://blog.goo.ne.jp/carioca_lab)の間欠タイマーの製作記事を拝借し、手持ちの部品に置き換えて作りました。
実際にはあまりOFFの時間が長いと、衛星追尾にならなくなるので、ON:OFF=0.4秒:60秒ぐらいを目標にします。
5 rpmだとすると、0.4秒での回転角は12°、180°を15回刻みで回るはずです。 ちょうどいいぐらいでしょう。
さて回路は割とシンプルですが、VP20内に実装しようとすると、ウナギの寝床みたいに細長くなってしまいます。
そこで、回路は①電池部分 ②制御回路部分(リレーより左) ③モーター駆動部 の3ユニットに分けました。
 これは、③のモーター駆動部です。
これは、③のモーター駆動部です。
アンテナを振るわけですから、何か障害物に当たって動かなくなった場合に、モーター本体が自らのパワーで自損してしまいます。
そのため、3Φモーター軸をまず4Φの銅パイプで受け、アルミ5Φ-アルミ6Φ-ABS8Φ-ABS12Φを摩擦だけでトルクを伝えるようにしました。
この「タケノコ」(=上の写真の左上)、一応思い切り手で捻ると滑って回転するようなので、まあこれでいいでしょう。


これは、①の電池部分。
DCプラグと単3電池×2のホルダーを直列にならべ、ホームセンターで天井の見切り材を1本買ってきて
これを台座にして両面テープやエポキシ接着剤で貼り付け一体化します。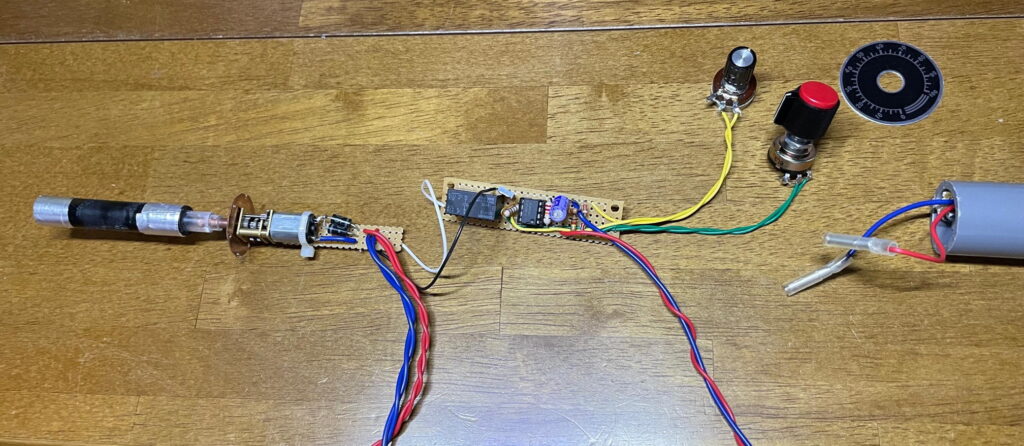
なんとか、VP20に内蔵できそうな体裁になってきました。
このままの状態で試運転してみました。
動画はこちら
なんとかうまく動くようです。 では実装してみます。
意外とうまく入りました。 写真上端は電池ユニットを収めた本ローテーター基部。
最下部は処分寸前のM型プラグをVP13のソケットに接着。
(サイズぴったり。いつもお世話になっています。)

アンテナへの給電は別途3D2V経由なので、このプラグは電波とは関係ないネジ止め用の構造材です。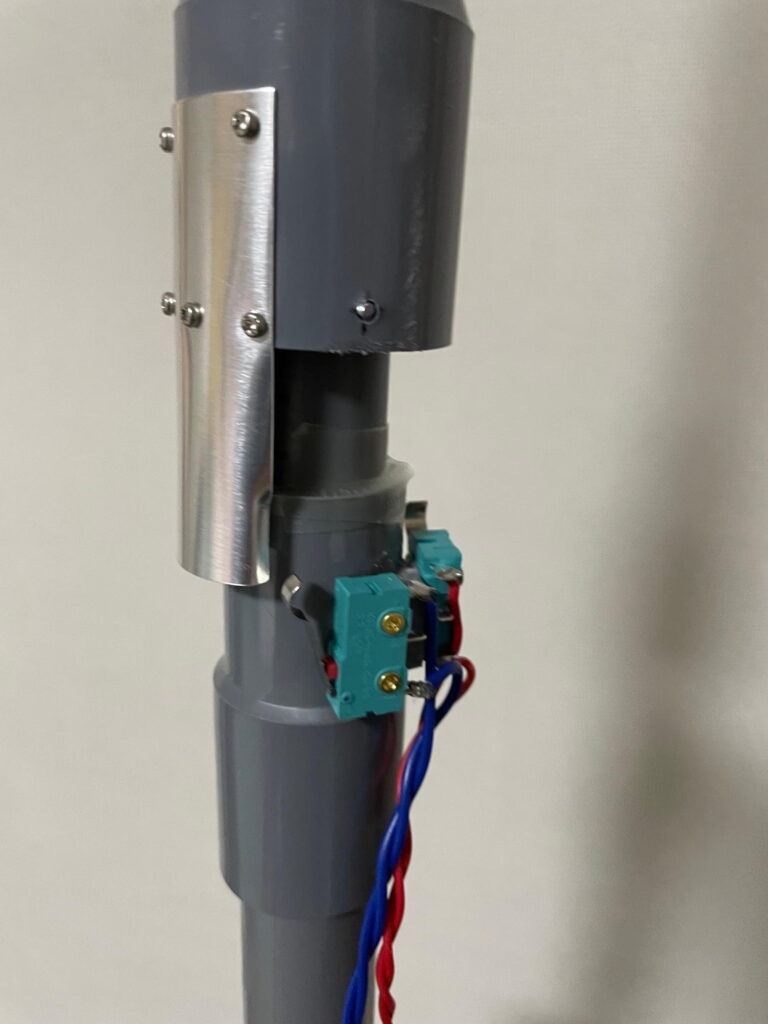
マイクロスイッチとアルミ板で、半回転ちょいで切れるリミットスイッチを構成して出来上がりです。
→次のページへ(衛星用VP20ローテーターの製作 ~その4)
→由木東空中線研究所 目次へ戻る