~あとづけ考察~
さて、なかなか冬場は寒さがきびしく、多摩川べりなどこのローテーターを使える空き地に行くチャンスがありません。
そこでここではこの「なんちゃって自動追尾」がどのくらい「ガチ自動追尾」に迫っているのか?検証してみたいと思います。
-・・・-
(1.仰角)
鉛直ビームでのMMANAの計算結果を見ると、少なくとも電力半値角は60°(±30°)はありそうです。
なので、とりあえず「肉眼で空を見上げたときの視界内」ぐらいのユルさは許容できそうです。
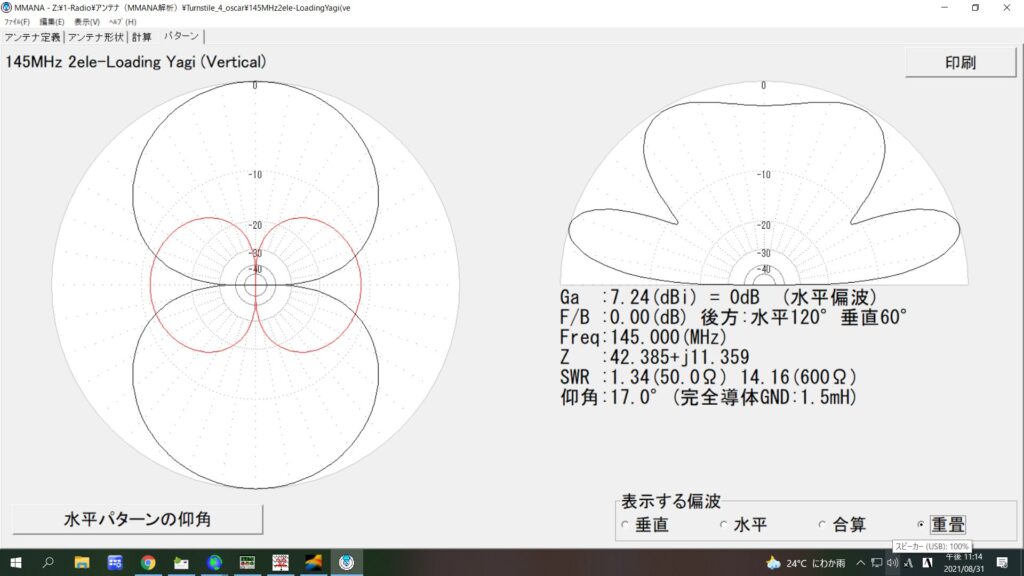
そうすると、仰角については45°固定にしておけば、EL=15°~75°ぐらいはカバーしそうです。
天頂から±15°の範囲は若干信号が弱くなるとは思いますが、たまにしか来ないパスですし、
低軌道衛星だとその時間は高々40秒程度。 GPでさえ強力に入ってくるのでまず心配ないと思います。
またAOS直後からビーコンは聞こえてきますが、私の場合自局のループがまともに還ってくるのはEL(仰角)=10°ぐらいからです。
これは近所の建物にも依るとは思います。 いずれにしてもEL=15°ぐらいからなら実用上支障ないでしょう。

(仰角を45°固定にして回したとき) (仰角を60°にして回したとき)
-・・・-
(2.方位角)
AOS(出)からLOS(没)まで、見かけの衛星の角速度は一定ではありません。
これは下図で、観測点からの衛星の仰角θと観測点~地球の中心~衛星の成す角Φにより、
sin(Φ+θ)という係数で表されます。
そして一方で、cos(Φ+θ)はちょうど衛星のドップラーシフトの度合を表す係数になります。
天頂通過時は衛星の飛翔方向を真横から見るので、速度の係数はsin90°=1.0、
その時の送受信周波数のドップラーシフトの低減割合はcos90°=0 (シフトしない)です。
Φはθの関数でもあり、cosの4乗とか2乗にルートがかかった式で表すことができますから、
この速度Vにかかる係数sin(Φ+θ)を仰角θだけで表すと下のグラフのようになります。
AOS(出)の瞬間は天頂を通るときに比べて、40%弱のゆっくりした動きということがわかります。
要は、見えている時の衛星の見かけの動きは一定ではない、ということです。
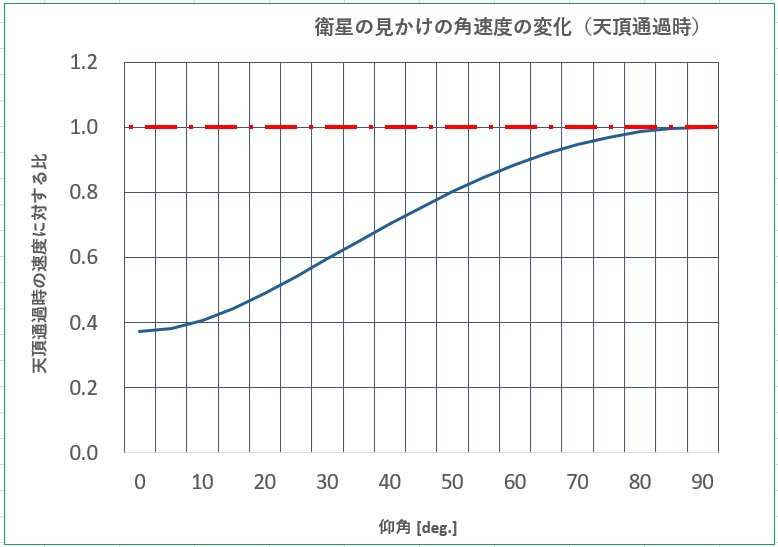
なお、上のグラフは低軌道衛星が天頂を通った時の見かけ速度の変化です。
このとき、自分と衛星との距離は500km程度。
もしこれが、地平線スレスレに顔を出す、最大仰角(MEL)10°のパスだと、
その距離は約1500kmになります。
そうすると見かけの衛星の角速度の変化は上記グラフよりもユルくなり、ドップラーシフトも穏やか目になります。
これは、救急車がサイレンを鳴らして ①自分の直近を通過した場合と、②遠くを右から左へ横切ったときの、
視線の動かし方の度合い、およびドップラー効果の違いから直感的に理解できると思います。 要は、上のグラフの場合が見かけの角速度の変化量が最も大きい、ということです。
そして、詳しい計算は省略しますが、衛星がAOS(地平線を昇ってくる時間)にそれに方位を合わせてこのVPローテーターをスタートさせ、(どうせEL=10°ぐらいに上がってくるまでは使えないので、ノコノコ車の中に戻り電鍵を用意しワッチを始める)首尾よくLOS(衛星が地平線に沈む)もローテーターの回転角が合ったとします。
このとき、上のグラフで示した見かけ上の角速度が変わる衛星の動きと、等速回転する(実際は断続的に回転する)このローテーターが、
どのぐらい追尾方向が変移するかをエクセル上で調べてみると、
「だいたい仰角35°付近で最大11°程度の方位のずれを生ずる」という結果でした。
これまた冒頭の電力半値角(プラスマイナス30°)の中に入ります。
なので、仰角の場合と同じく、方位角についても、「定速で追尾させても、ユルユルビームアンテナなら守備範囲から逸脱しない」ということになります。

最初のうちは定速回転のローテーターの方がやや先行します。
この辺りでズレが最大になります、これから衛星の方が見かけの角速度は大きくなり、
IMEL(最大仰角)のところでアンテナの方角と合う(はず)。
-・・・-
そういうわけで、
(私自身の背景としては)=長年、アンテナタワーの無いハムライフが続き、まして仰角ローターを使う衛星通信は、夢のまた夢だった。
(間接的な動機は)=低軌道衛星が主流になり、高ゲインのビームアンテナが衛星通信で必須でなくなったと知り、実際そのとおりGPでもソコソコできた。
(現状は)=多エレビームアンテナ+方位仰角ローテーターの「本格派」 そして一方GPアンテナによる「有りもの派」に二極化しているようです。 もちろん私は有りもの派。
(今回の試みは)=そこにあえて両者の中間の、「ユルいビームアンテナを、大ざっぱに自動追尾させる」第3の方法を考えてみました。 これは以前の、「GPとターンスタイルを切り替えて、アンテナを追尾させずに衛星を追いかける」の延長線上でもあります。
そのためのアイデアとしては、以下のようなものがありました。
① 車の電装品に使われている超小型ギヤードモーターを水道管VPに仕込んで、モービル基台につけられるローテータを自作し、
② ローディングコイルでエレメントを短縮した2エレのクロス八木を製作し、
③ PCによるピンポイントなアンテナ制御によらない、定速のぜんまい仕掛けに近い、間欠動作の自動運転で回す。
あとは反転兼用の起動スイッチを、SwitchBotにでも交換すれば、シャック内からwi-fiを使ってスマホ制御でコントロールが可能なシステムになります。 (まだやってはいませんが、買って用意はしてあります。)